Lesson 10
1 Learning Objectives
By the end of this lesson students will be able to:
- Write the DE of a second order system
- Determine the roots of a second order system
- Classify the output of a second order system as undamped, underdamped, critically damped, or overdamped
- Write the equation form of the step response of a second order system
- Calculate the damped frequency of an underdamped second-order system
- Calculate , , , , , %OS, and of a system
- Determine values for components of a system required to meet design specifications
2 Review
A second-order transfer function can be written two ways.
Form 1:
Form 2:
If the transfer function is in Form 1, the coefficient of is equal to and the coefficient of is equal to .
If the transfer function is in Form 2, the coefficient of is equal to and the constant is equal to .
Put the transfer function into whichever form makes more sense to you, and then you can solve for and by using the coefficients and constant in the denominator polynomial.
3 Overview
Second order systems can have four different types of outputs to a step input:
- Undamped
- Underdamped
- Critically damped
- Overdamped
We determine what the response will be by either solving for or by finding the roots of the polynomial in the denominator and plotting them on the complex plane. The roots of the denominator are called poles in control systems lingo. The roots of the numerator are called zeroes.
3.1 A Quick Refresher on Complex Numbers
Use your method of choice to find the roots of the polynomial . The roots are .
3.2 How to Find Roots
- Use the
roots([a b c])function in MATLAB - Use a version of the quadratic equation (when ):
- Use the quadratic equation:
- If any of the roots (poles) fall on the right side of the complex plane, the system will be unstable. Otherwise, the response will be one of undamped, underdamped, critically damped, or overdamped.
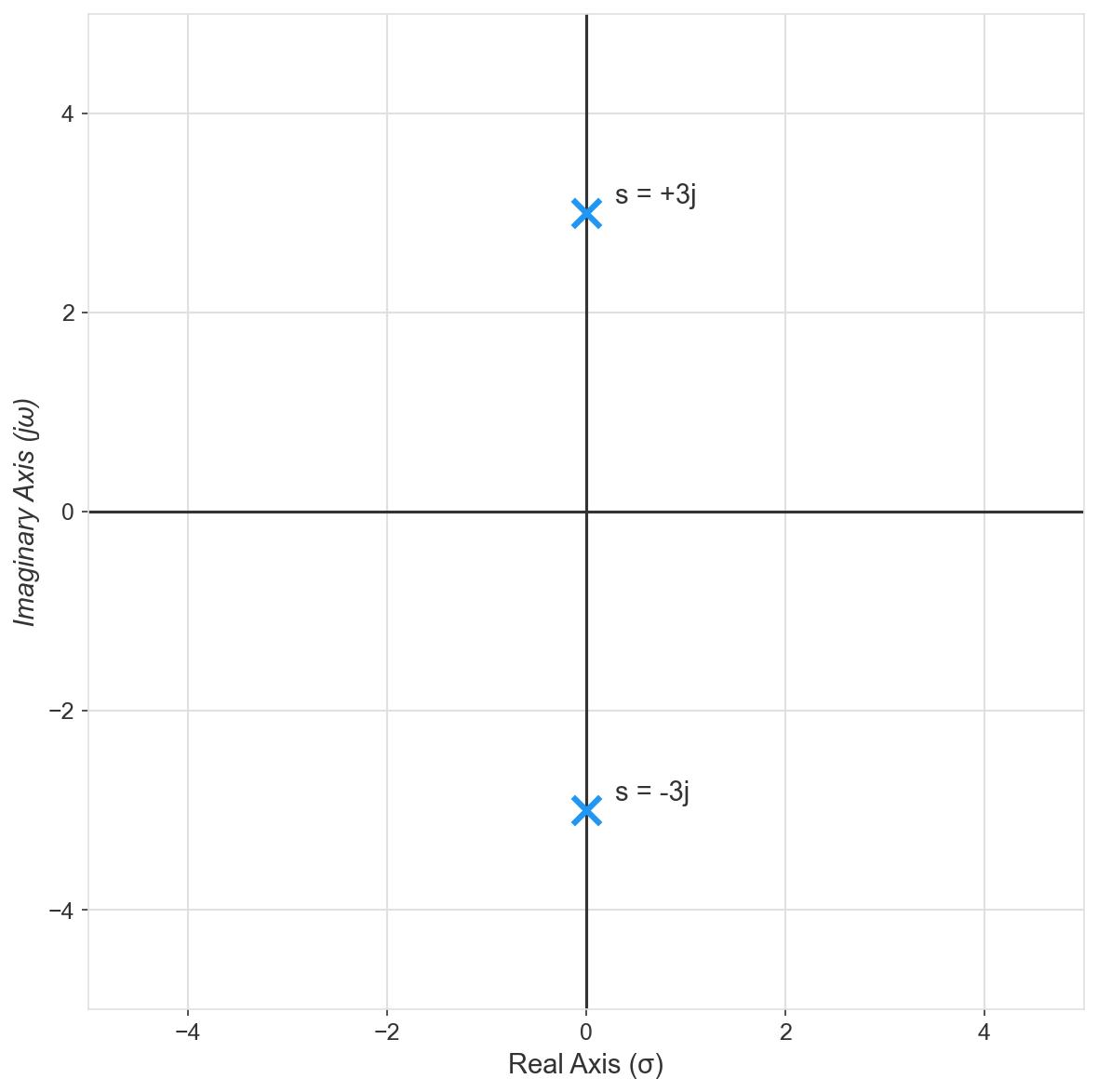
4 Undamped Response ()
When there is no middle term in the denominator of the polynomial.
- In undamped systems the poles are always on the imaginary axis.
Assume the transfer function is
Then the roots will be .
And the plot of the poles is:
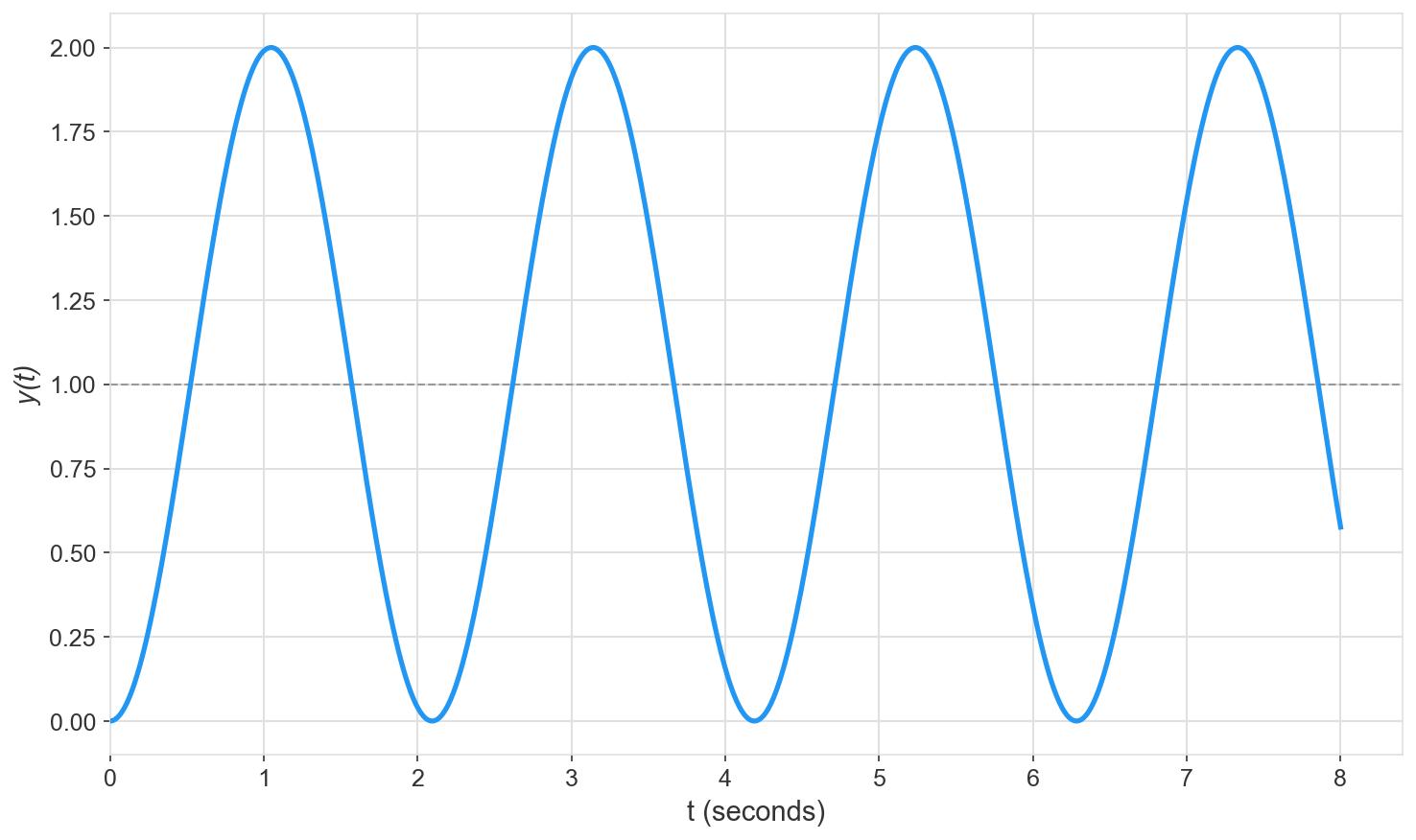
And the solution of the DE given a step input is:
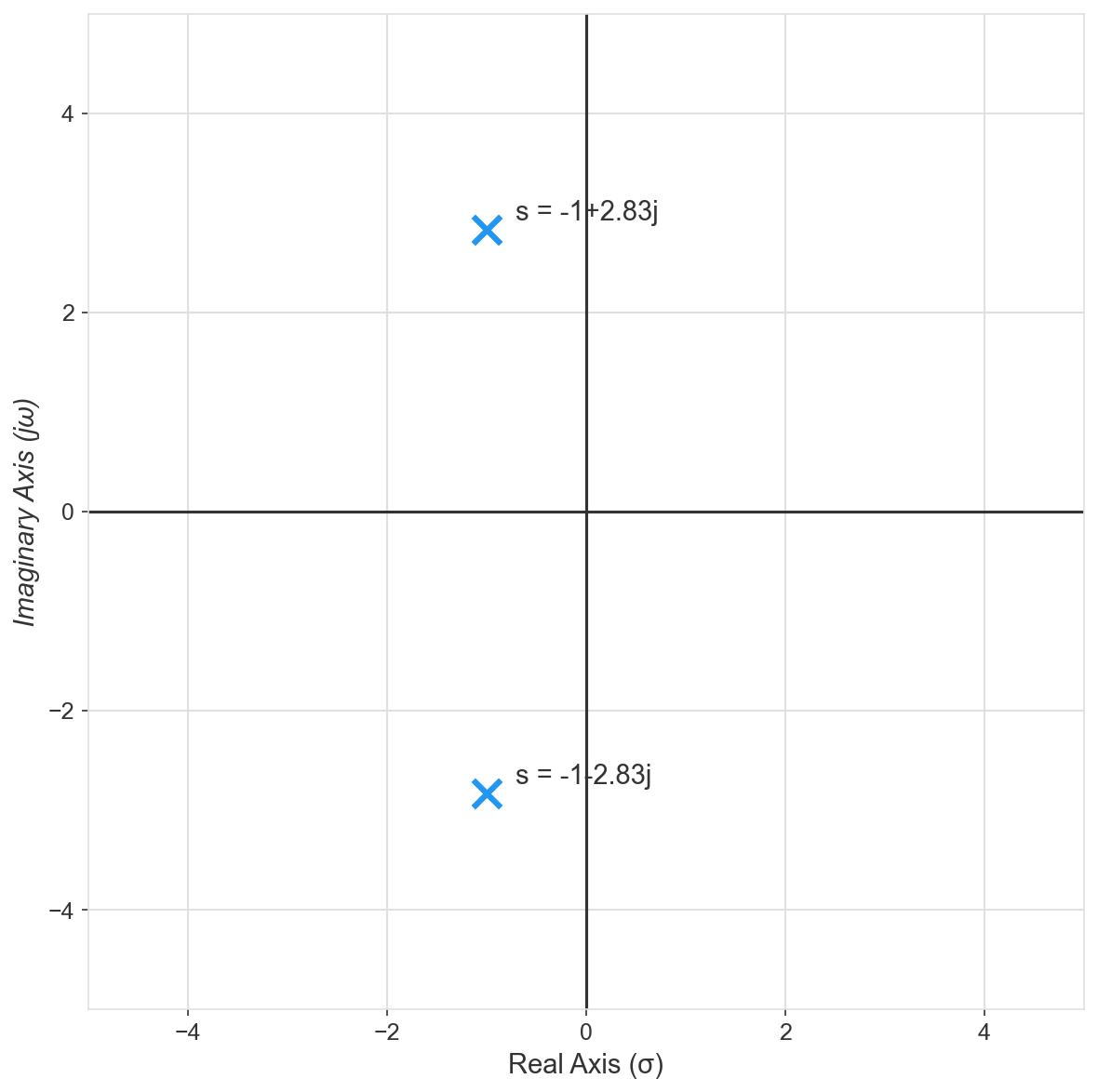
5 Underdamped Response ()
Assume
Then the roots of the denominator are
The plot of the poles looks like:
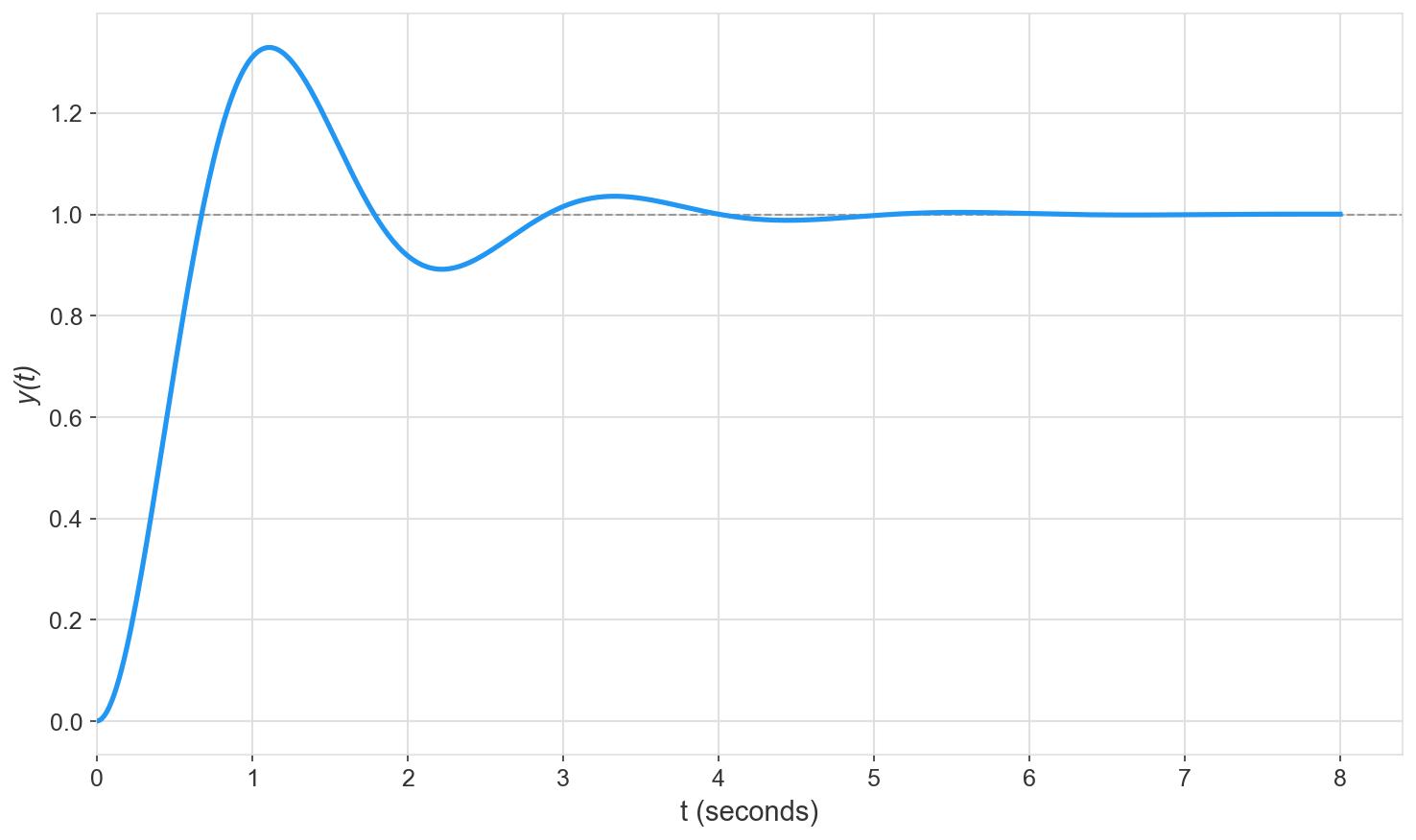
And the solution of the DE given a step input is:
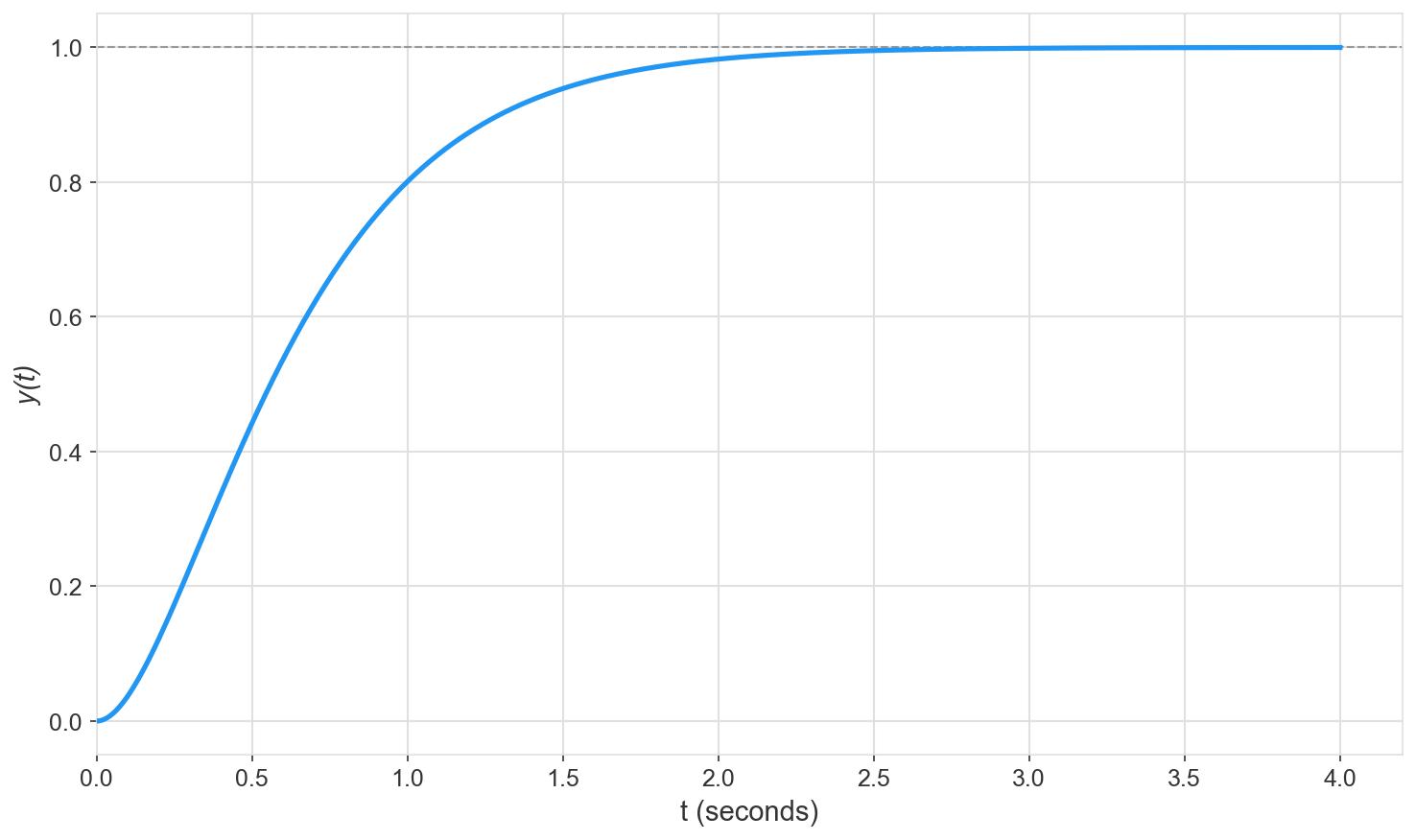
6 Critically Damped Response ()
Assume
Then the roots of the denominator are
The plot of the poles looks like:
And the solution of the DE given a step input is:
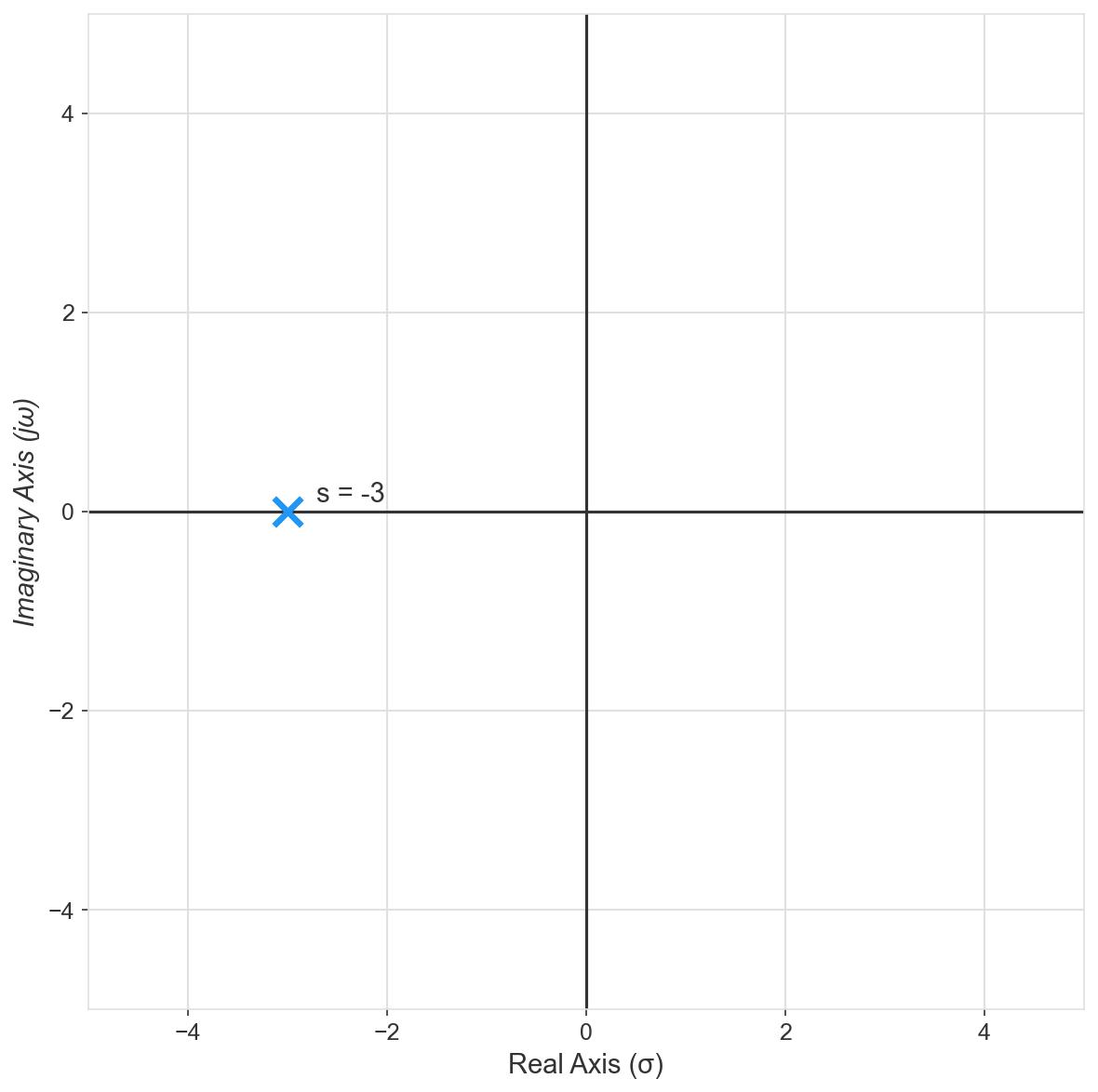
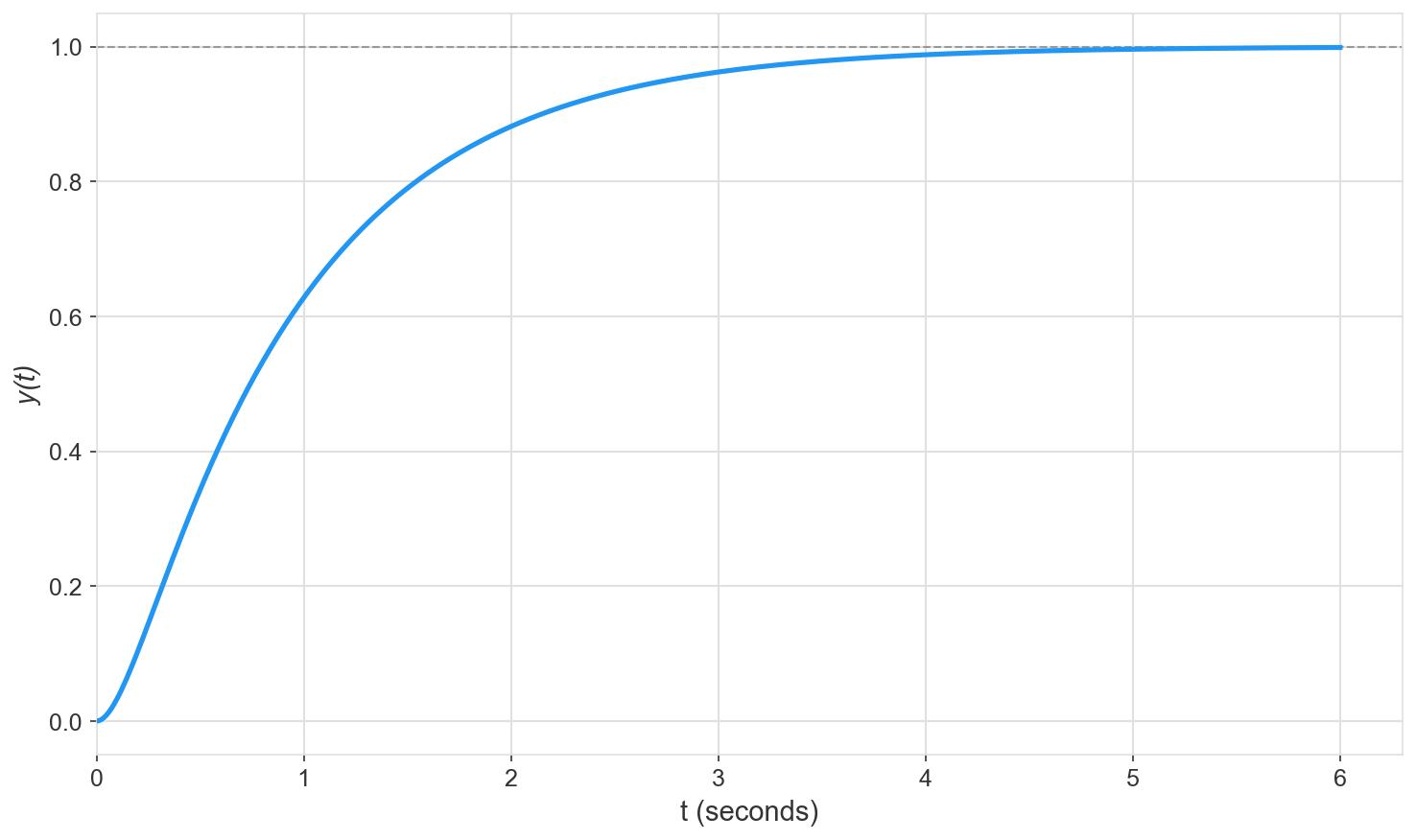
7 Overdamped Response ()
Assume
Then the roots of the denominator are
The plot of the poles looks like:

And the solution of the DE given a step input is:
8 Comparison of All Four Responses

- If a system has pure imaginary roots of multiplicity one, a sinusoidal input will result in an exponentially growing sinusoidal output (instability). If a system has roots in the RHP, or imaginary roots of multiplicity greater than one, a transient response can cause instability.
8.1 Student Exercise 1
Given: Four transfer functions
Required: Determine (1) the and of each and (2) the type of response (underdamped, undamped, overdamped, critically damped)
9 Mathematical Pattern of the Four Response Types
The response (output) of a system modeled by a DE comprises two parts: a homogeneous solution and a particular solution. Or, in mathematical terms
The homogenenous solution, , is also called the:
- natural response
- free response
- transient response
The particular solution, , is also called the:
- forced response
- steady-state response
In controls, we refer to the two solutions as the transient response and the steady-state response. The transient response is determined by the physical components of the system and the steady-state response depends on the system input.
In plain English, the transient response is what the system output looks like when it goes from one steady-state to another steady-state. The steady-state value is what value the system settles down to after the transient disappears.
To get the formula for the transient response, we give the system an impulse input. Mathematically, the transient responses for the four pole locations will always follow the patterns below.
9.1 Overdamped
Two real poles at
9.2 Underdamped
Two complex poles at
9.3 Undamped
Two imaginary poles at
9.4 Critically Damped
Two real poles at
9.5 Student Exercise 2
Write out the expected form of the solution to each of the transfer functions in Exercise 1.
10 Characteristics of the Second Order Transfer Function
10.1 Natural Frequency
Represented by . The frequency of the transient output if it is (or if it were) undamped.
10.2 Damped Frequency
Represented by . The frequency of the output in an underdamped system.
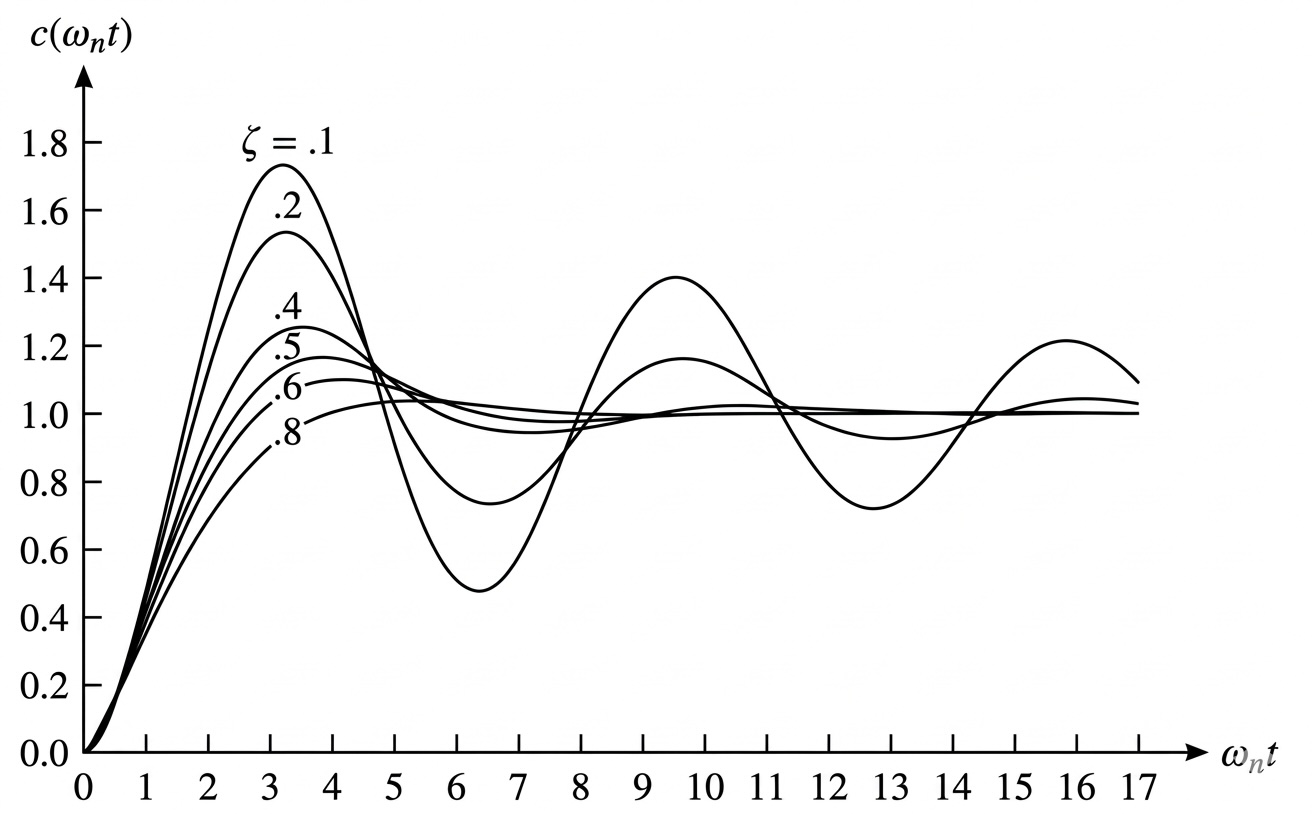
10.3 Damping Ratio
Represented by . How fast an underdamped system dies down to its steady-state.
Effect of different on response:
11 Characteristics of Second Order Systems
Five important features: (1) rise time, , (2) peak time, , (3) percent overshoot, %OS, (4) settling time, .
11.1 Rise Time
Time required for the waveform to go from (10% of steady-state output) to (90% of steady-state output).
No analytical solution is available. Set and and solve for .
11.2 Peak Time
11.3 Percent Overshoot
Note that you can calculate if you know %OS:
11.4 Settling Time
11.5 Summary Figure

- Second-order systems do not have an easily identifiable time constant like first-order systems.
11.6 Exercise 1
Given: The transfer function
Required: , %OS, , and .
wn=sqrt(100)
zeta=15/(2*wn)
tp=pi/(wn*sqrt(1-zeta^2))
os=exp(-zeta*pi/sqrt(1-zeta^2))*100
ts=4/(zeta*wn)
syms s t
y=ilaplace((1/s)*(100/(s^2+15*s+100)))
fplot(y,[0 1])
t1=vpasolve(y==0.1,t,[0 0.2])
t2=vpasolve(y==0.9,t,[0.2 0.4])
t2-t111.7 Student Exercise 3
Given: The system shown below.
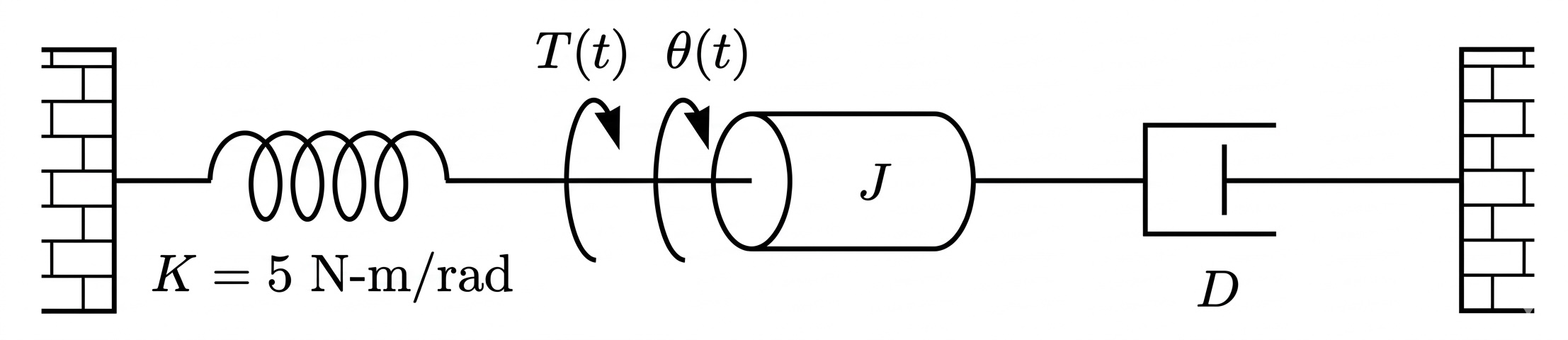
Required: Find and to yield 20% OS and a settling time of 2 seconds for a step input to torque.